系统介绍
磁条导航差速AGV主要是针对1吨以内负载的货物搬运,能够通过顶升或滚筒移载机构自动对接货物,具有任务路径固定,行走精度高,运行稳定等特点,在应用中大大提高了工作效率,在汽车、3C、制造业的产线搬运具有广泛的应用。
应用场景
负载量:适用于1吨以内负载的货物搬运
主要应用行业:汽⻋、3C、制造业的产线搬运
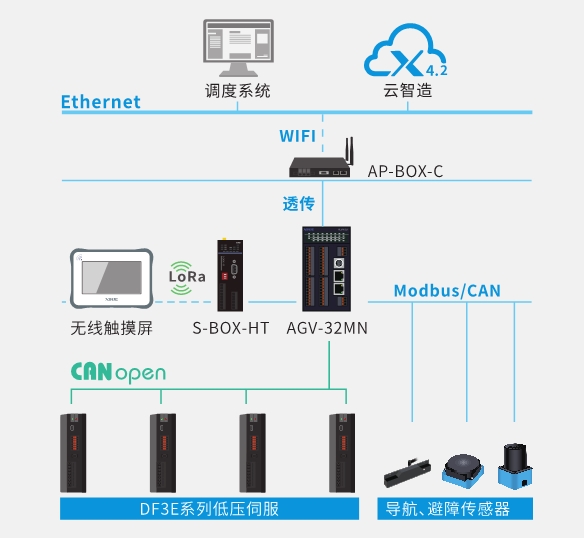
控制方案
控制系统通过对磁导航传感器、RFID传感器、激光避障、安全触边等信号的采集,并根据设置好的任务路径轨迹行走,通过磁导传感器的数据对驱动轮进行差速控制,实现纠偏、转向等控制,保证AGV能够稳定沿着磁条行走。
当RFID传感器检测到AGV行走路径上布置的功能标签卡时,AGV开始执行岔路选择、原地旋转、停止等功能,实现AGV的导航控制、功能控制以及安全保护。
技术参数
磁条导航
导航方式
差速控制
控制方式
双向行走
运行方向
前进、后退、原地旋转
行走功能
±10mm
定位精度
±10mm
行走精度
0-60m/min
运行速度
0-1000kg
负载能力
缓停、急停
停止方式
激光避障、安全触边
防护方式
3米可调
防护范围
单驱动、双驱动
驱动单元
方案优势
快速落地
标准化整车控制程序,保证项目快速落地。
支持二次开发
具有标准化底层运动控制接口,支持逻辑层进行自主二次开发。
丰富的功能
集成了辊筒、顶升等多种移栽机构控制,丰富的功能选择。
双运动模型
支持单差速、双差速运动模型控制。
操作灵活
支持可视化路径编辑、单机自主路径规划、联机系统调度。
无线屏通讯,可视化参数、便捷修改。
定制化服务
提供定制化服务,满足客户需求。










 苏公网安备32021102003018号
苏公网安备32021102003018号