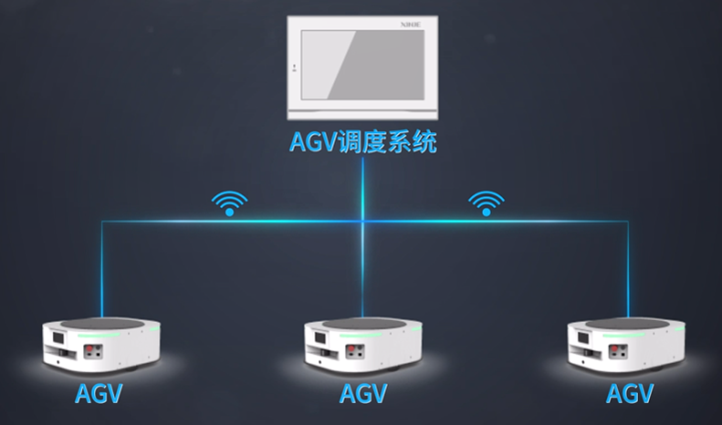
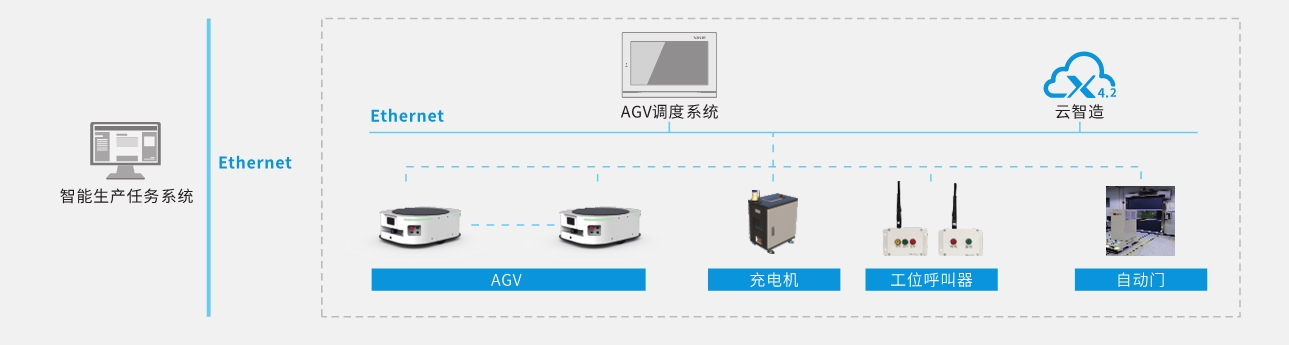
系统介绍
系统主要是针对多台AGV在同一应用场景运行时,将系统作为主站与AGV、充电机、工位呼叫器等从站部署到同一局域网中,根据任务数据自动分配车辆,并对多台AGV进行路径规划、交通管制、指令下发、自动充电等功能,同时实时监控车辆状态信息、报警信息、当前位置等,满足运行路线较多、且运输频繁复杂的应用场景。
应用场景
⽤于AGV数量较多、运⾏路线较多、且运输频繁复杂的场合。
控制方案
控制系统采用双轮差速的方式进行驱动控制,通过激光避障、安全触边等信号的采集、相机对场地铺设的二维码进行拍照读取和惯性导航传感器的实时数据传输进行处理、计算,将离散的二维码构成连续路径,来实现纠偏控制,保证AGV能够在场地中稳定行走。并控制AGV能够实现前进、后退、原地旋转、停止等功能,满足实际使用中的导航控制、功能控制以及安全保护。
方案优势
任务生成
接收工位呼叫、上层系统数据自动生成任务
车辆分配
根据车辆状态,自动分配最优的车辆执行任务
路径规划
自动规划AGV运行的最优路径、自动调整
交通管制
实时对多台AGV进行交通管制,避免运行堵塞
自动充电
监控AGV电量状态,到达低电量自动分配充电任务,保障续航
实时监控
显示车辆状态信息、报警信息、当前位置等








 苏公网安备32021102003018号
苏公网安备32021102003018号