控制方案
方案采用XLQ7系列总线运控器,配合EtherCAT总线完成行走轴+升降轴动作(包含变频和伺服控制方案),通过控制器自带Ethernet/lP协议适配各品牌传感器。处理轨道断码(包括16段断码),调用工艺函数功能块,使得位置连续,运行无断点。
采用MOVA指令的数据更新功能,完成速度闭环的实时调速。多车运作,包含在安全距离内等待前车工作功能和运行中跟着前车功能,形成系统内提供物料活性指数与搬运设备搬运指数配置合理化。
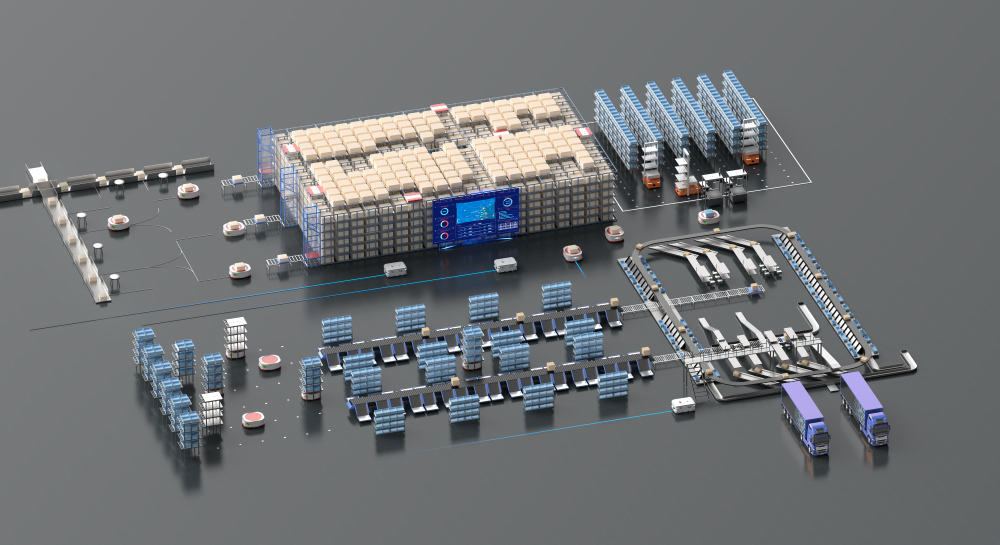
系统拓扑


方案优势
速度300m/min、加速度5m/s2
轻载50-200KG的Amhs设备
速度260m/min,加速度2.5m/s2
载重1.5-2吨搬送
速度50-80m/min,加速度0.3 m/s2
载重3吨/5吨以上搬送
两种驱动方案
适配伺服和变频两种形式驱动,采用主控PID控制,实现双闭环精准匀速和定位。
灵活配合多车运行
灵活配合场景的多车运行,保持两车之间的安全间距以及跟车协同动作。
多场景环形轨道
嵌入多断码形态的连续位置控制,适应更多场景的环形轨道。
模块化协同调度
模块化协同车调度软件的任务交互,确保通讯实时。
无线信号稳定
整体配合无线场景,确保信号强度的稳定,低丢包率的指令交互。












 苏公网安备32021102003018号
苏公网安备32021102003018号