
行业背景
传统仓储面临空间利用率低、作业效率低、人工成本高等难题,随着技术的发展和企业货物存储需求,密集仓储行业在不断追求更高的作业效率、更低的成本和更好的环境可持续性。通过技术创新和发展,密集仓储行业正逐渐从传统仓储模式转变为智能化、自动化和可持续发展的形式。
设备简介
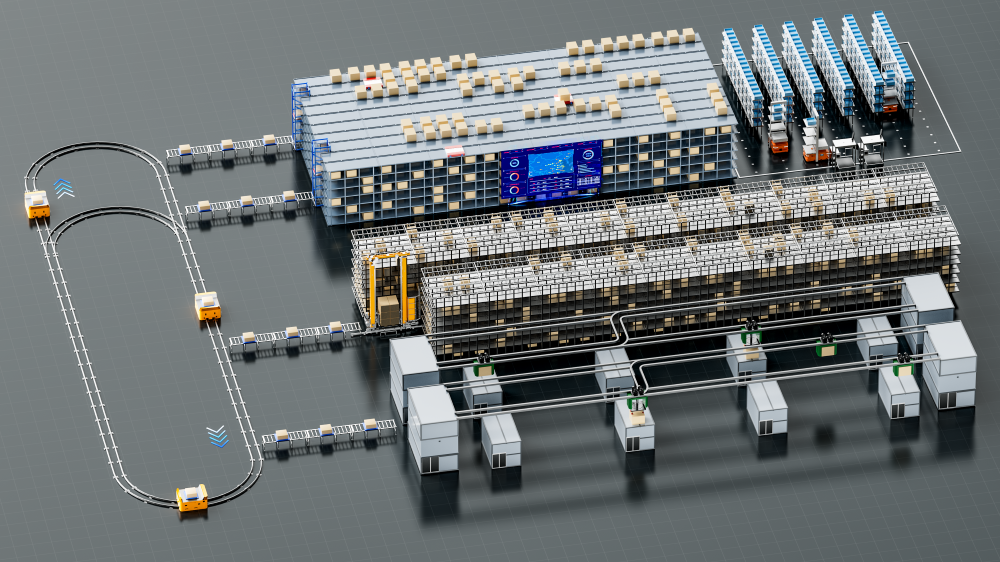
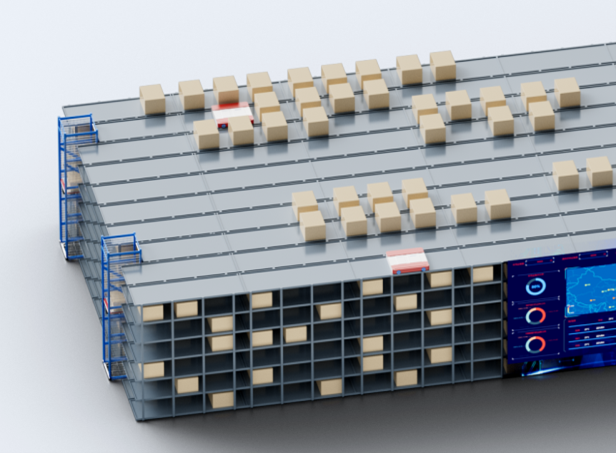
在立体仓储中四向车协同往复式提升机,通过行驶轨道在货架不同层、不同货道内完成作业任务,在仓库监控系统的控制和调度下,执行载车、载货、输送线接驳、穿行等任务,使整个密集库可以实现多层多车同时运作。
控制方案
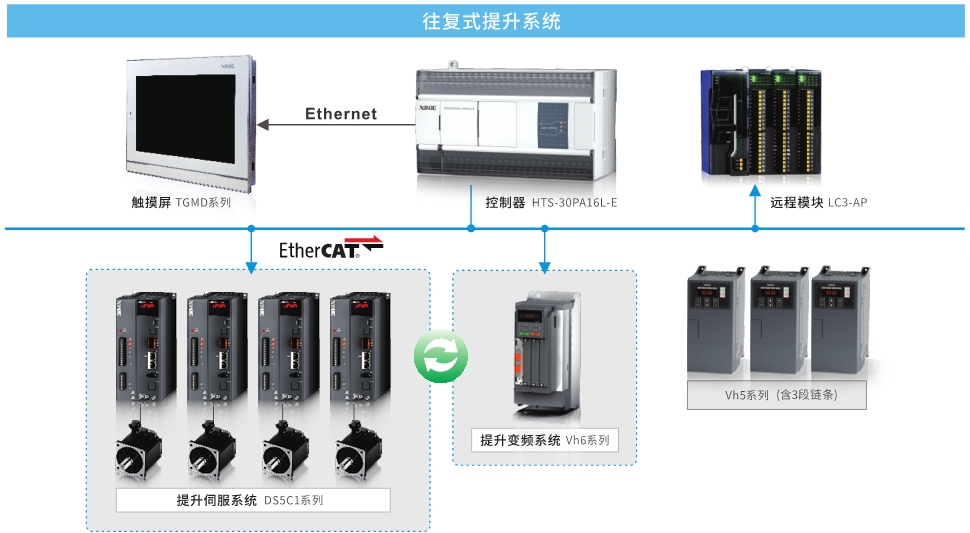
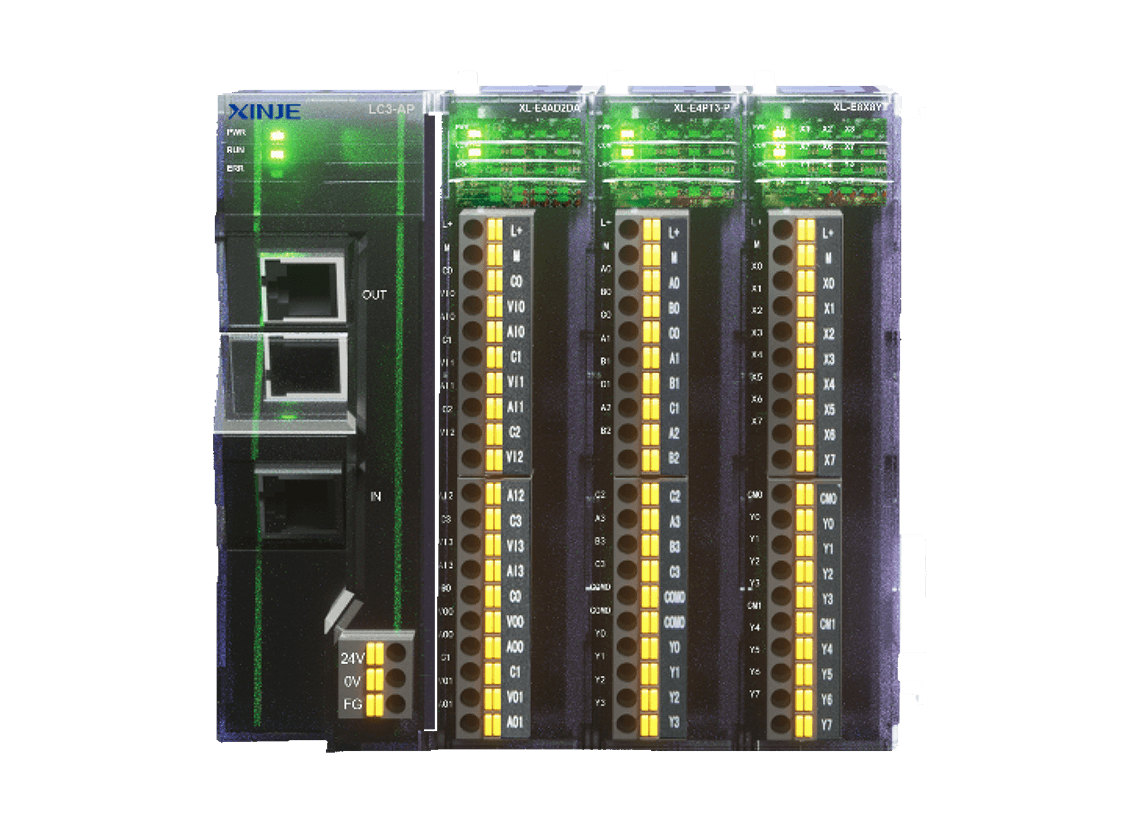
采用XDQ系列运动控制器,以EtherCAT总线控制两轴/四轴伺服升降货载平台(或通过EtherCAT控制变频系统),使用齿轮绑定方式保证多轴同步,结合齿轮齿条的机械结构和电机绝对值编码,完成目标层的精准定位,更实现短时柔性启停,且载货平台无沉量晃动。整套系统确保载货平台的四角偏差在2mm内,通过运动控制总线的高响应性,实时监控升降速度、载货平台位置、载货扭矩、生态报警等参数。
方案优势
运行参数
载重1.8T-2.0T,线速度800mm/s(机械允许可达1m/s),加减速时间1s。
故障处理
具备两轴/四轴一键调平功能,快速应对平台异常,保证高效修复。
低温
应对冷库场景,伺服电机兼具备-20°C的低温环境运行。
高响应性
总线通信周期1ms,保证两轴/四轴运行的高度同步性。
安全性
预见性抱闸,设备故障时抱闸系统提前500ms制动,保证平台无沉量,避免倾斜产生的安全隐患。
技术服务
根据客户工艺需求,定制操作界面和程序系统,提供系统升级/维护技术服务。










 苏公网安备32021102003018号
苏公网安备32021102003018号